

Field Robotics
“Robotics and IT solutions to service offshore infrastructure”
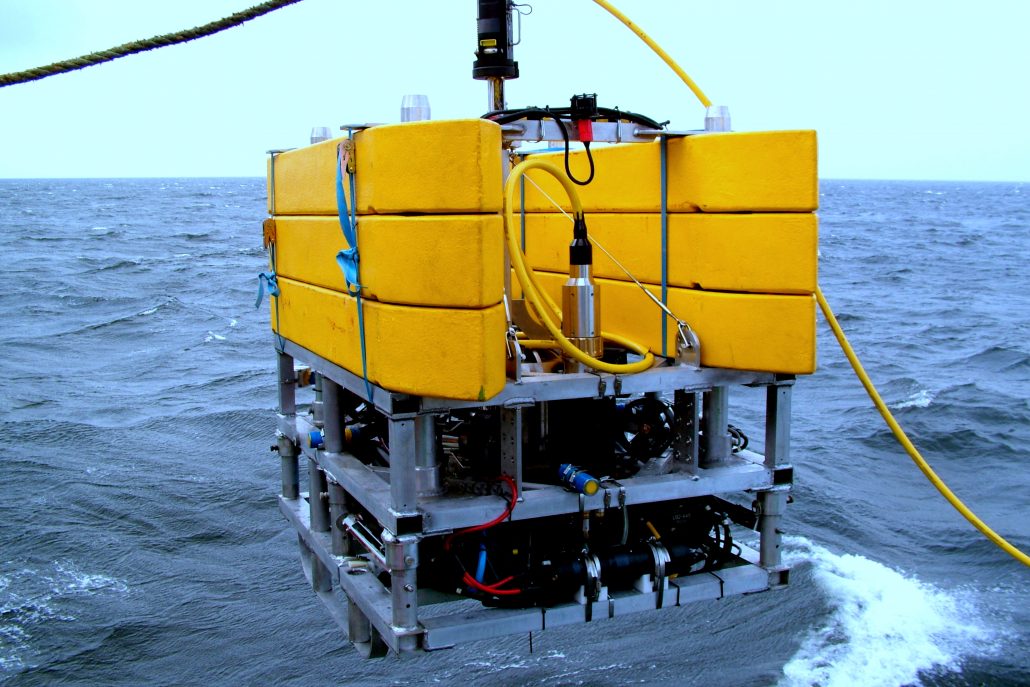
High energy environments prohibit the use of divers to maintain energy infrastructure. Developing underwater robots and remotely operated vehicles enables us to exploit these high-energy, hostile environments safely, reliably, and cost effectively.
MaREI’s ‘Field Robotics’ capabilities focus on the development of ICT and robotics systems to:
- support the planning, construction and maintenance phases of marine and renewable energy installations,
- facilitate increased automation of facility inspection and intervention activities,
- fundamentally reduce the costs of exploiting these high-energy (MRE-rich) regions
Challenges the team are addressing include the need for automatic and semi-automatic stabilisation & navigation with minimal pilot input, ensuring device control redundancy, and the need for intuitive pilot-focused information and control systems. Researchers on the ‘Field Robotics’ team have access to state-of-the-art marine robotics facilities that include the 2000m depth-rated MRE-ROV, 1000m depth-rated ROV-LATIS, mini-ROVs, AUVs, UAVs, robot arms, and supporting infrastructure.
The team works closely with the ‘Marine Operations, Maintenance & Management’, ‘Ocean Observation’, and ‘Earth Observation’ teams to provide a holistic and integrated approach to the optimisation and advancement of MaREI’s Observation & Operations objectives. For more information relating to MaREI’s ‘Marine Operations, Maintenance & Management’ capabilities, please contact Ger Dooly or Oriana Baric.
For more detailed information on the work of the Mobile and Marine Robotics and Research Centre where the MaREI researchers are hosted, see www.mmrrc.ul.ie.
Core Research Areas Include
- Development of ROV/AUV/UAV and airborne inspection technologies
- Sensor-based approaches to monitoring and inspection, utilising acoustic and camera-based imaging for registration, positioning, navigation and visualisation systems to facilitate ROV inspection
- Development of control strategies for ‘intervention in motion’ utilising real-time video and high-resolution sonar servoing systems
- Remote presence/communications and high-speed data security provision for remote monitoring and control of robotics intervention
Ongoing Projects
- Aeolus – a mid-altitude surveillance platform for use in security, health and safety operations.
- AWESCO – Creation of a new generation of leading European scientists, by training Early Stage Researchers (ESRs) in training-by-research environments.
- Excellabust – Aims to significantly strengthen marine robotics research by addressing networking gaps and deficiencies that exist between key organisations at the EU level.
- Low cost ocean observation Technologies (Cullen Fellowship)
- MaRINET2 – trans-national access programme to 57 top-level research facilities and infrastructures.
- MORUS – robotic system comprised of an aerial and an underwater vehicle capable of autonomous and cooperative work.
Former Projects
- Challenging conditions UAV landing – Development of reliable semi-automated control system helping UAV pilots to land airborn vehicles on moving targets.
- NETMAR – Maritime incidents intervention and situational awareness systems
- Seadbed survey in shallow coastal areas – Development of control systems for unmanned surface vehicles to autonomously perform surveys even in shallow water.
- OceanRings – Control and navigation suite for offshore commercial ROVs.





